项目5 近视警示器¶
一、概述¶
近视眼越来越多,抛开遗传因素,主要还是不良用眼习惯导致的。特别是弓腰驼背,埋头看书,但是知道归知道,真的坐下本来挺直的腰杆又不知不觉地趴在桌子上。
为了健康,为了保护视力,我们用蜂鸣器和超声波传感器做一个简易近视警示器。
二、项目实施¶
(1)使用超声波测距¶
硬件准备:
主控:Arduino UNO、IO 传感器扩展板 V7.1
模块:超声波传感器
连接线:TypeAtoB方口USB连接线
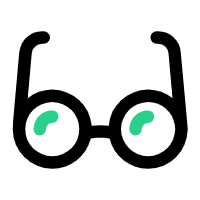
- 接线引脚TRIG–D7 、ECHO–D8、 GND–GND 、+5v–VCC
程序编写:
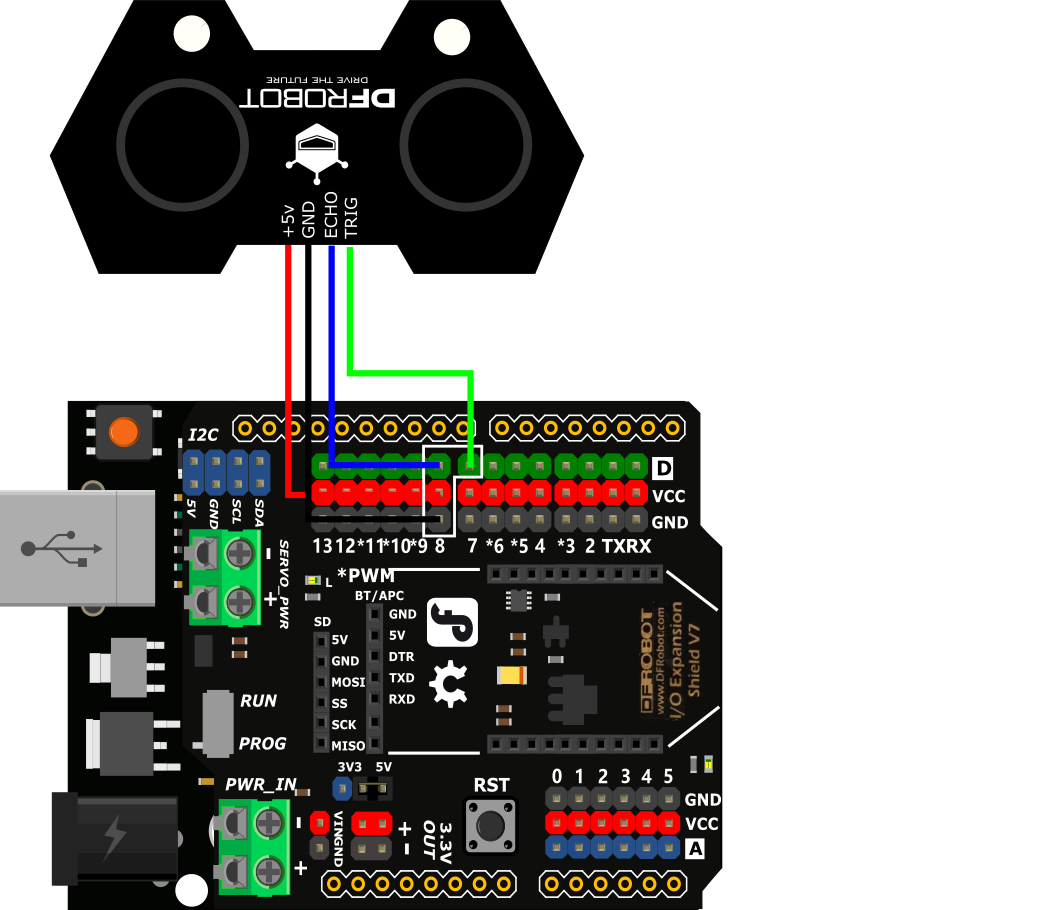
- 打开pingpong库的官方文档,找到常用库示例中的“超声波传感器”,并用IDLE打开。
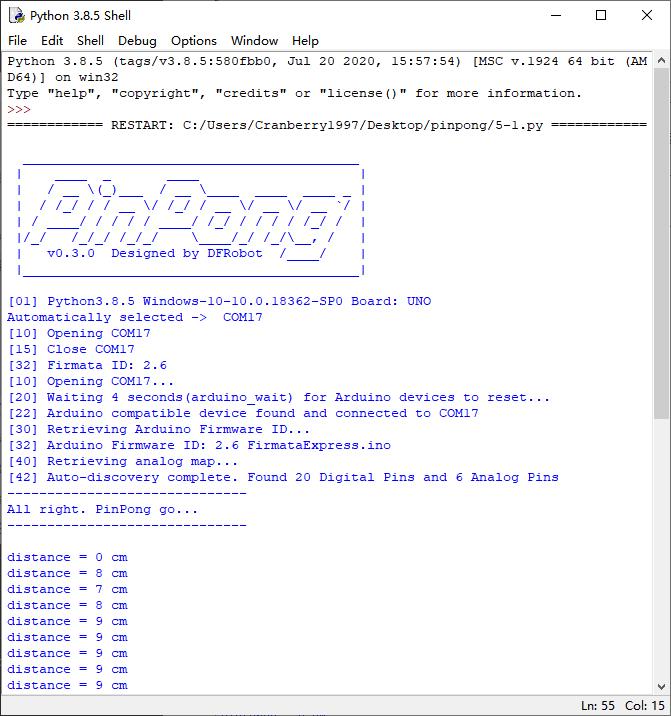
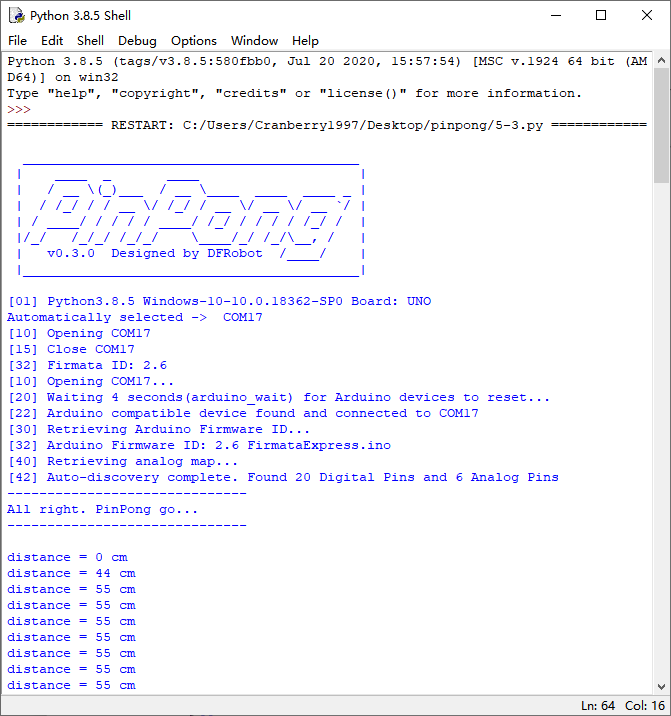
- 摁下F5运行程序,查看效果。在新弹出的窗口中会显示超声波传感器测得的距离。
(2)使用蜂鸣器模块¶
硬件准备:
主控:Arduino UNO、IO 传感器扩展板 V7.1
模块:蜂鸣器模块
连接线:TypeAtoB方口USB连接线
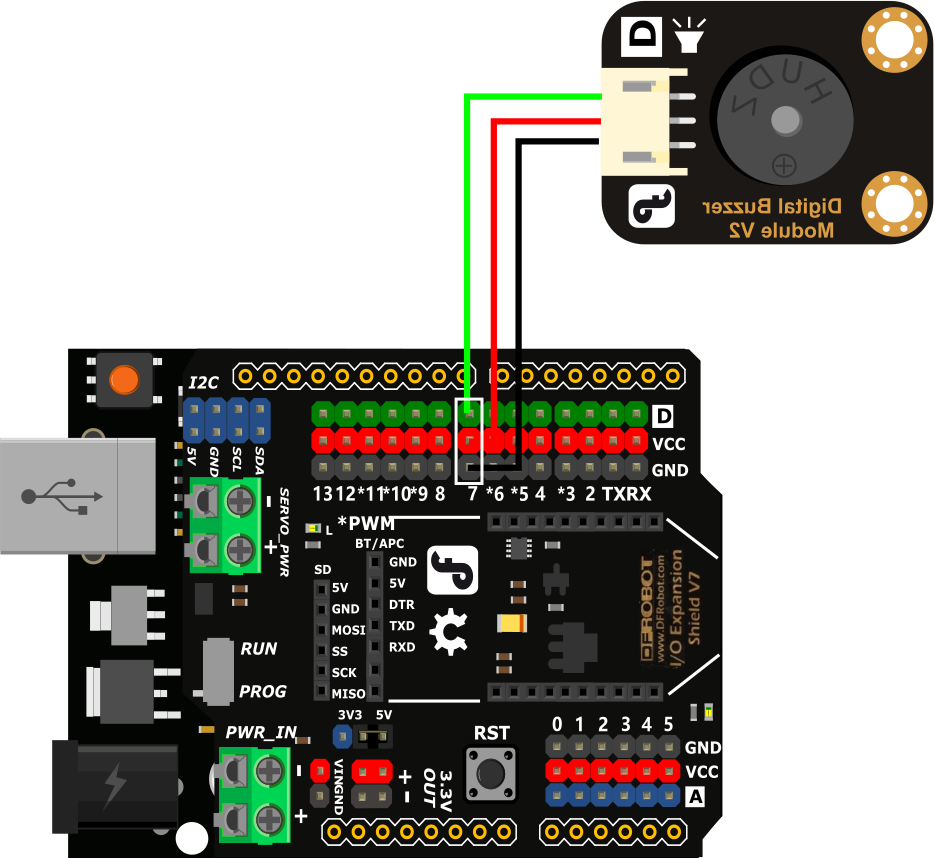
- 蜂鸣器模块连接到D7引脚
程序编写:
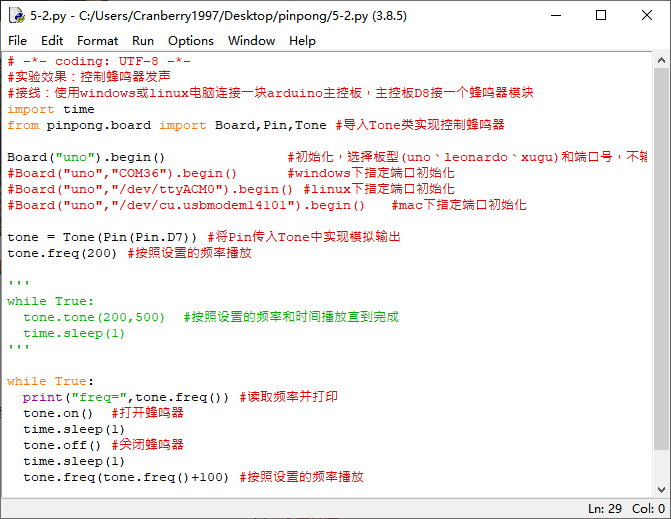
- 打开pingpong库的官方文档,找到常用库示例中的“蜂鸣器”,并用IDLE打开,将程序中的D8改为D7。
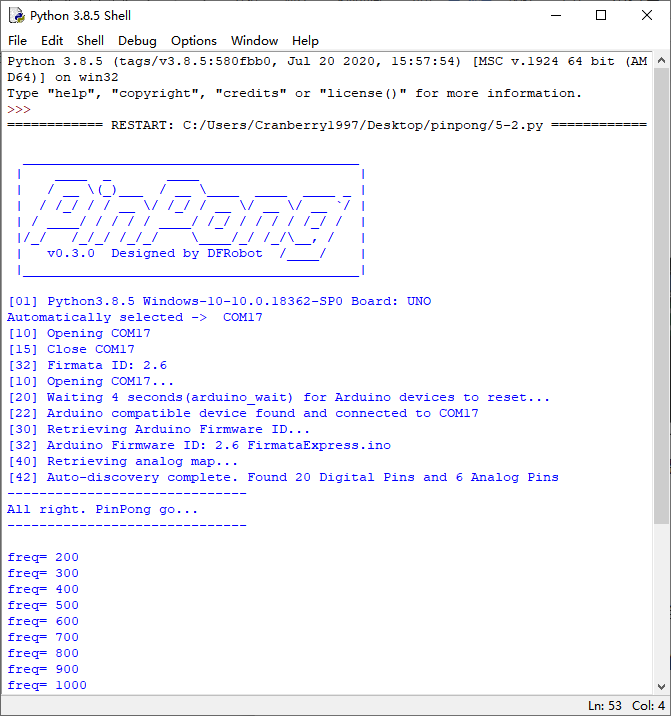
- 摁下F5运行程序,查看效果。在新弹出的窗口中会显示蜂鸣器的声音频率,蜂鸣器会按音阶递进响起。
(3)完成近视警示器¶
硬件准备:
主控:Arduino UNO、IO 传感器扩展板 V7.1
模块:蜂鸣器模块、超声波传感器
连接线:TypeAtoB方口USB连接线
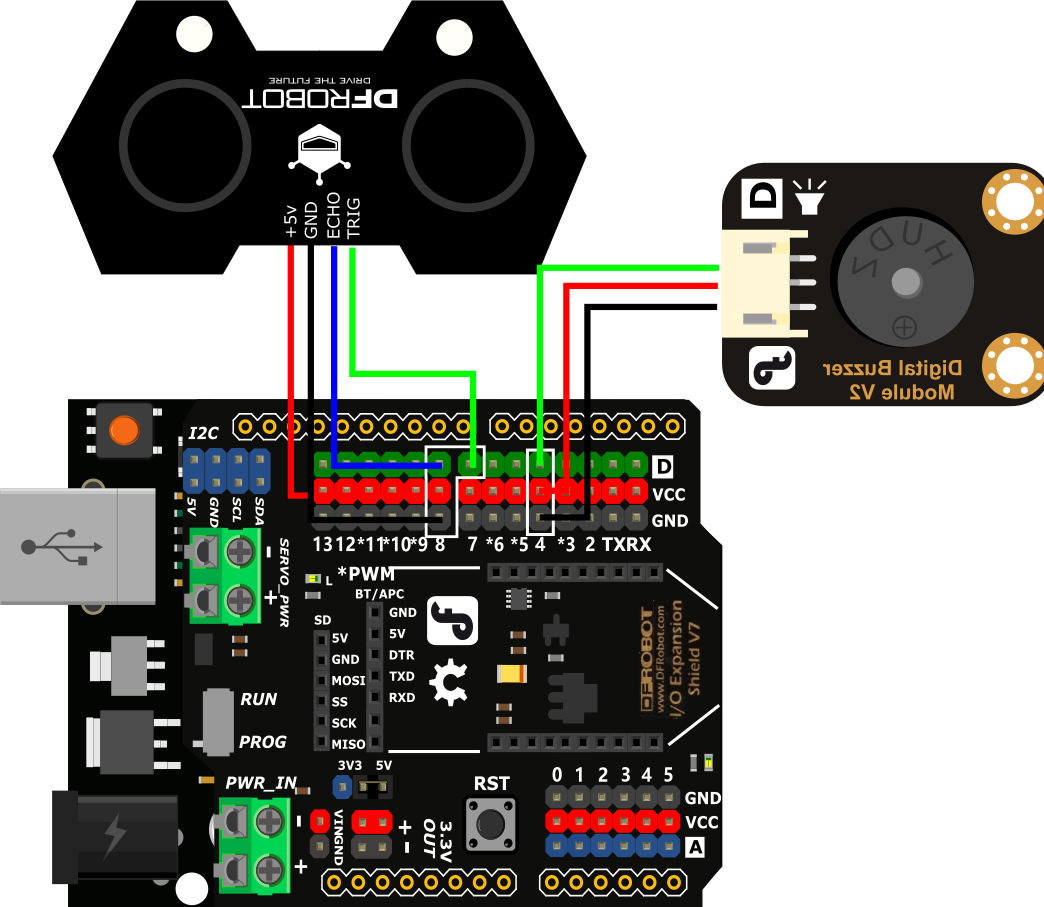
- 接线引脚TRIG–D7 、ECHO–D8、 GND–GND 、+5v–VCC
- 将蜂鸣器模块接入D4引脚。
程序编写
import time
from pinpong.board import Board,Pin,SR04_URM10,Tone#导入必要的库函数
Board("uno").begin()#初始化,选择板型(uno、leonardo、xugu)和端口号,不输入端口号则进行自动识别
tone = Tone(Pin(Pin.D4))#初始化蜂鸣器模块引脚为D4
TRIGER_PIN = Pin(Pin.D7)#初始化超声波传感器TRIG引脚为D7
ECHO_PIN = Pin(Pin.D8)#初始化超声波传感器ECHO引脚为D8
tone.freq(200) #初始化蜂鸣器频率
sonar = SR04_URM10(TRIGER_PIN,ECHO_PIN)#初始化超声波传感器
while True:
dis = sonar.distance_cm() #读取超声波传感器距离
print("distance = %d cm"%dis)
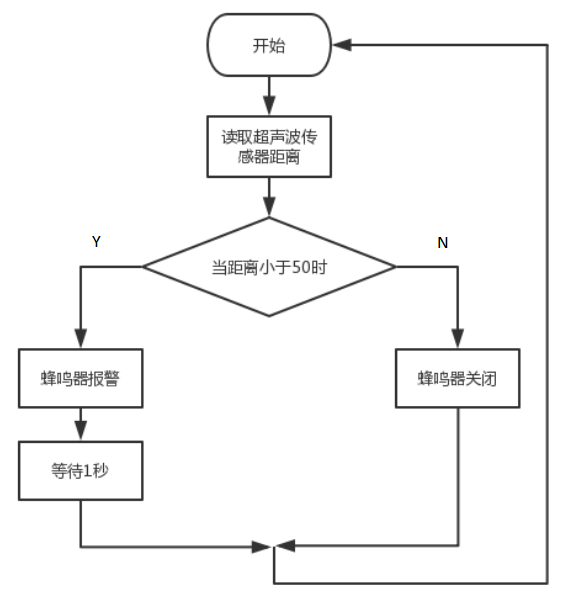
if dis < 50:
tone.on()
time.sleep(1)
else:
tone.off()
运行代码,当超声波传感器监测到距离小于50时,蜂鸣器会报警提示距离桌面太近。
三、代码分析¶
- 设计程序逻辑图
- 导入必要的包和初始化设置。
import time
from pinpong.board import Board,Pin,SR04_URM10,Tone#导入必要的库函数
Board("uno").begin()#初始化,选择板型(uno、leonardo、xugu)和端口号,不输入端口号则进行自动识别
tone = Tone(Pin(Pin.D4))#初始化蜂鸣器模块引脚为D4
TRIGER_PIN = Pin(Pin.D7)#初始化超声波传感器TRIG引脚为D7
ECHO_PIN = Pin(Pin.D8)#初始化超声波传感器ECHO引脚为D8
tone.freq(200) #初始化蜂鸣器频率
sonar = SR04_URM10(TRIGER_PIN,ECHO_PIN)#初始化超声波传感器
- 加入判断
while True:
dis = sonar.distance_cm()#读取超声波传感器距离
print("distance = %d cm"%dis)
if dis < 50:
tone.on()
time.sleep(1)
else:
tone.off()
四、硬件分析¶
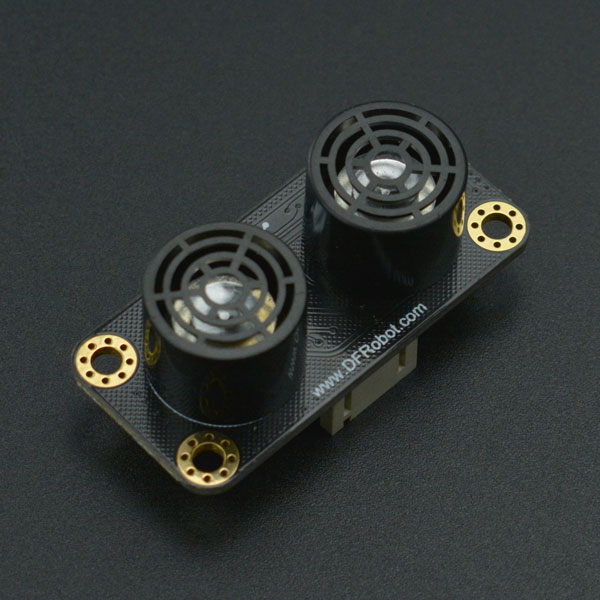
- 认识超声波传感器
目前主流的测距传感器有超声波测距传感器,红外线测距传感器,激光测距传感器和雷达传感器。其中,超声波传感器适用于大幅平面静止测距。普通超声波传感器测距范围约2cm~450cm。
我们可以很清楚的看到实物超声波传感器上有 4 个角:VCC—5V 电源脚, Trig—出发控制端,Echo—接收端,GND—地段。图片中双探头传感器中,一个用来发送超声波,一个用来接收超声波。中间的单头超声波传感器即可以发送也可以接收超声波。这个传感器是我们接触的第一个四个引脚的传感器,使用的接线也比较特殊,后面的硬件连接需要做特殊处理。
超声波传感器测量距离的过程,超声波发射器向某一方向发射超声波,同时开始计时;超声波在空气中传播,一旦碰到障碍物立即折返;超声波接收器接收到反射波,同时停止计时。那么距离就可以通过时间差来计算出来。
- 认识蜂鸣器
首先,我们对喇叭应该非常熟悉,常见的耳机就是两个小喇叭,还有收音机,MP3,PM4播放器,电视机音响的发生原件都是喇叭。喇叭也叫做扬声器,是电声转换期间,它可以把模拟电信号转换为声音信号,属于宽频率发声器件。
而蜂鸣器是一体化的电子讯响器,可以在不同驱动波形下发出单调的声音,属于窄频率发声器件。我们可以通过改变频率设置蜂鸣器发声音高。
从外在表现看,喇叭和蜂鸣器最大区别是喇叭可以发出各种声音,而蜂鸣器只能发出几种单调的声音。从内在发声原理来看,蜂鸣器是利用压电陶瓷将电信号转化为机械振动信号;扬声器是利用电磁铁将电信号转化为机械振动信号。